
前阵子,老黄在 CES 上又狠狠秀了波肌肉。
不过呢大多数人,基本都被全新的 RTX 50 系显卡给吸住了,世超这两天研究了下发现,那些被咱 “ 冷落 ” 的新技术里,一个两个其实也都憋着大招。
就拿Cosmos 世界基础模型平台来说,这可是个让 AI 能够理解物理世界的好东西。
根据官方的说法, Cosmos 平台是一个专门为物理人工智能开发者设计的平台。
这又是物理人工智能,又是开发者,打眼一看,好像跟咱也没啥太大关系。
但大伙儿先别着急,这次 Cosmos 一发布,技术报告一甩,有些报道的标题已经用上了 “ 开启物理 AI 大时代 ” 这样的字眼,连老黄都说“ 机器人的 ChatGPT 时刻即将到来 ”。
而世超也去翻了翻 Cosmos 的技术报告,这么说吧, Cosmos 就好比物理 AI ( 机器人、无人车等 )的“ 黄埔军校 ”,咱们以后能不能指望机器人养老,它说不定能帮上大忙。
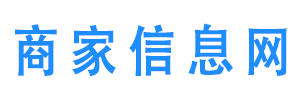
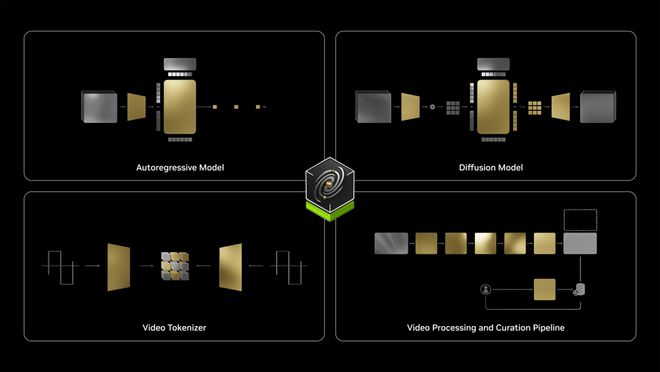
咱们可以简单把 Cosmos 平台,当成一个工具箱,里边儿大概集成了世界基础模型 ( WFM ) 、高级分词器器、安全护栏以及加速数据处理管道这么几个 “ 工具 ” 。
后面那几个专业名词没听说过不要紧,但模型总该知道是啥吧。
这次,英伟达一口气在 Cosmos 上发布了 8 个世界基础模型,而且都是基于 2000 万小时的视频训练出来的,参数量从 40 亿到 140 亿不等,根据不同场景的应用需求,还可以分为 Nano 、 Super 和 Ultra 三种。

看着唬人,但世界基础模型,跟咱们熟悉的图像、视频生成模型差不多,是生成式 AI 模型。
只不过它生成的东西并不是视频那么简单,更准确的说,当你输入文本、图像、视频或者运动数据以后,世界基础模型生成的是有物理规律的 “ 场景 ” 、 “ 环境 ” 。
本质上,就是合成出高度仿真的数据,来实现物理 AI 跟虚拟环境的交互。
至于其他的什么高级分词器、安全护栏和加速数据处理管道,咱了解个大概就行。像高级分词器可以把复杂的数据简化,给数据划重点。安全护栏就更好理解了,就是防止有害的输出,保护隐私。
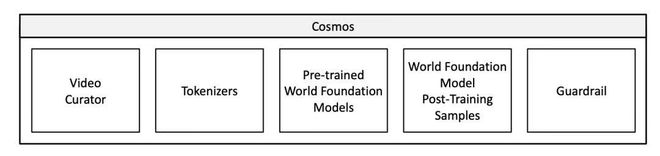
另外, Cosmos 还用到了一个 “ 先预训练再后训练 ” 的法子。
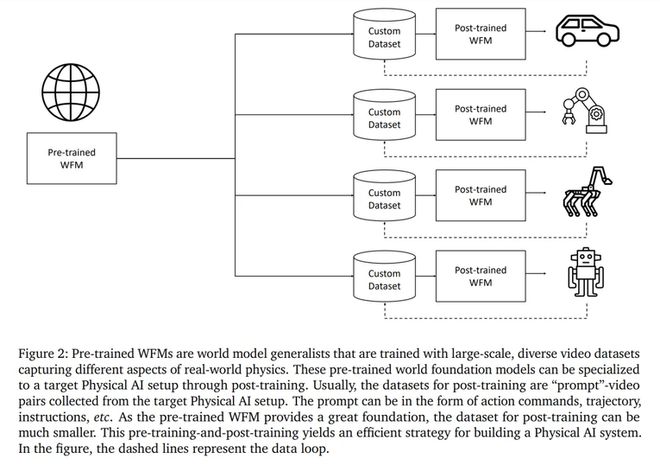
大概意思是,预训练阶段先给模型喂大规模的真实视频数据,起码要让模型知道物理世界到底是咋运转的。
接着,后训练阶段再具体问题具体分析,对预训练模型进行微调,满足特定任务的需求。
总之就是, Cosmos 平台通过各种技术手段,为物理 AI 构建出了一个跟现实物理世界类似的空间和交互环境。

不过说了这么半天,可能有差友还是没太明白,这玩意儿到底能用来干啥。
其实这个问题,老黄已经在发布会上讲得很清楚了,就是机器人和自动驾驶汽车。
拿机器人行业来说,为啥这么多年了一直没啥大突破,很重要的一个原因就是缺数据。
跟大语言模型不太一样,机器人训练需要的数据不只是文字、图像那么简单,因为机器人要感知这个世界,还要跟这个世界产生交互,所以它就得学习物理规律、动态变化。
但这些数据,恰恰是最难收集的。
还是拿机器人洗碗举例,看似动作很简单,但机器人想学会你得有视觉数据,比如餐具的形状大小、油污程度,还有抓放碗的力度、用多大力气擦洗这些力学数据,当然,洗碗过程中手臂移动、抓取角度的调整,包括一些复杂的动态因素,也需要收集、标注数据。
像之前的斯坦福 Aloha 家务机器人,还是开发者通过亲身示范 “ 遥控 ” 机器人完成指定动作,来收集数据。
所以这个时候, Cosmos 就派上用场了。
模拟出一个洗碗环境,不就相当于,提前给机器人预习了一遍现实世界,等模型出师了,再放到现实世界去实操。
这样一来,训练效率上去了,成本也能控制住。
按照英伟达官方的介绍,现在已经有一部分机器人和自动驾驶公司用上了 Cosmos 。
OpenAI 投的那家 1X ,用 Cosmos 来给机器人做动态规划。

小鹏也用 Cosmos 来合成各种天气和路况的数据,训练自动驾驶算法。
当然了,精准模拟现实世界只是理想状态下的 Cosmos ,包括技术报告里也提到,现阶段的世界基础模型还比较早期,生成的视频并不完全符合物理规律。
该说不说,世超现在也觉得走世界模型这条路,确实有搞头。
如果有一天, AI 能对现实世界进行模拟甚至是一比一复刻,并像咱们人一样理解世界、做出决策,这才更贴近咱们人类对于人工智能的期望。
去年,包括 Lecun 、李飞飞这些 AI 大拿,还有谷歌 Deepmind ,其实都在研究世界模型。世超盲猜一波,今年在世界模型和机器人领域里,可能会出现突破性的进展。
但不管成与不成,擅长 “ 卖铲子 ” 的英伟达,都是那个最大赢家。
撰文:西西
还没有评论,来说两句吧...